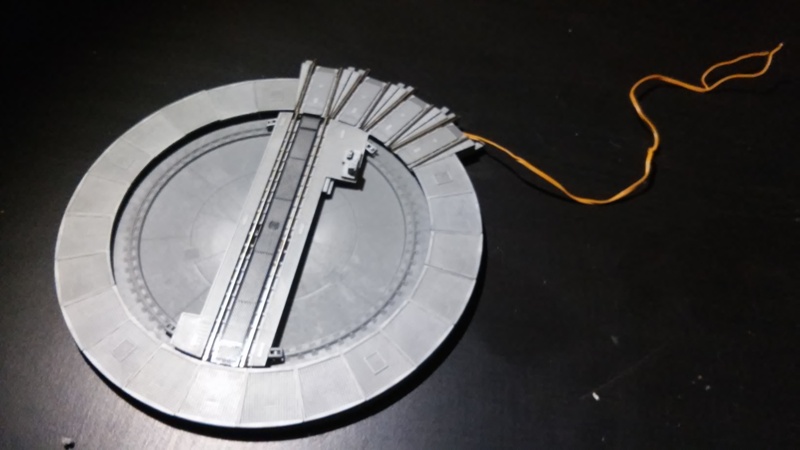
Hier een projectje dat ik al een tijdje geleden heb gedaan: een Fleischmann handdraaischijf aandrijven met een stappenmotor, besturing met een Arduino.
Het geheel heeft ongeveer 25 euro gekost (inclusief de 12,50 voor de draaischijf op Marktplaats), dus voor de prijs hoef je het niet te laten. De draaischijf wordt als segmentdraaischijf later in een kopstation ingebouwd. Maar met de stappenmotor is de draaischijf ook helemaal rond te draaien, dus deze ombouw is ook te gebruiken voor 'echte' draaischijven. (ik had op enig moment bijna spijt om er een segmentdraaischijf van te maken).
Benodigdheden:
- Een handdraaischijf van Fleishmann
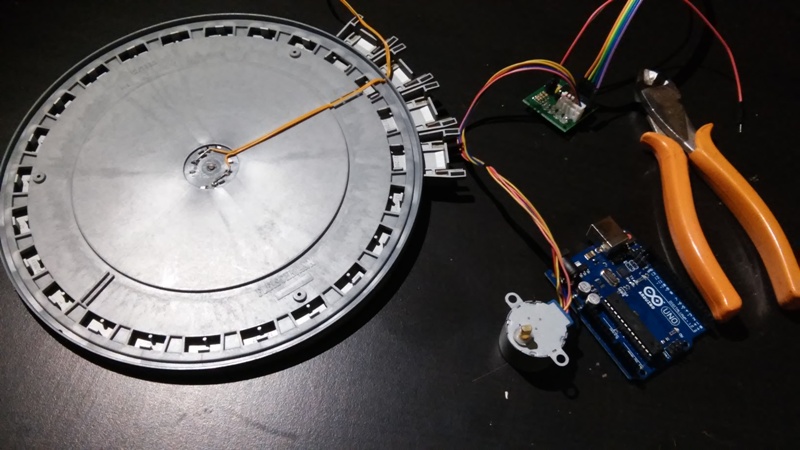
- Een Arduino microcontroller
- Een stappenmotor (ik heb de stappenmotor gebruikt die in het Arduino assortiment zit)
- Een beetje programmeerkennis (voor het programmeren van de Arduino)
- en wat schroefjes, boutjes, draadjes enzo.
Dit is de basis
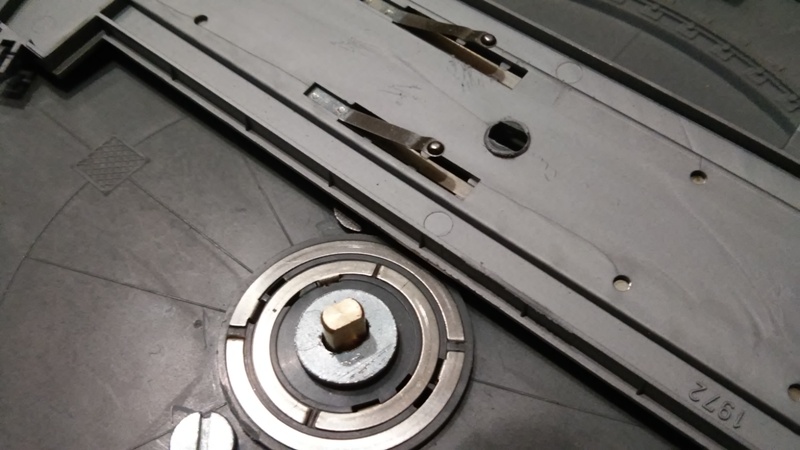
De mechanische kant eerst maar eens aangepakt. De brug van de draaischijf zit met een soort popnageltje vast aan de basis (de kuil). Die voorzichtig los gemaakt.
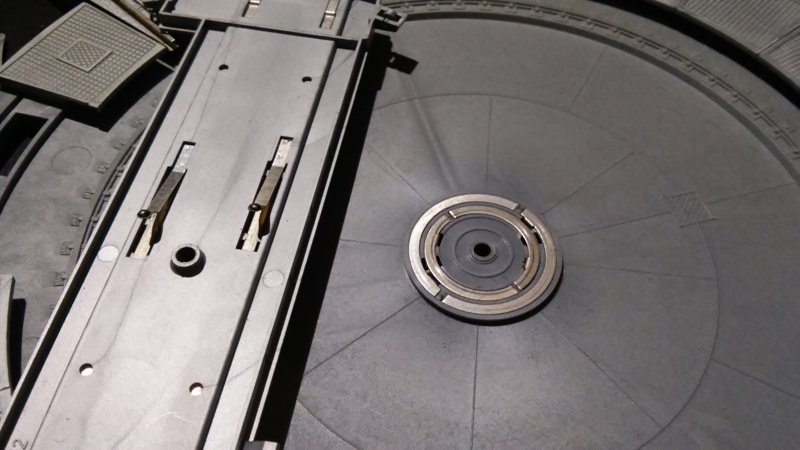
Op de stappenmotor (met 1:64 vertraging) zit een as met platte kanten. Het gat in de brug heb ik voorzichtig uitgevijld tot deze klem over de as van de motor gaat.

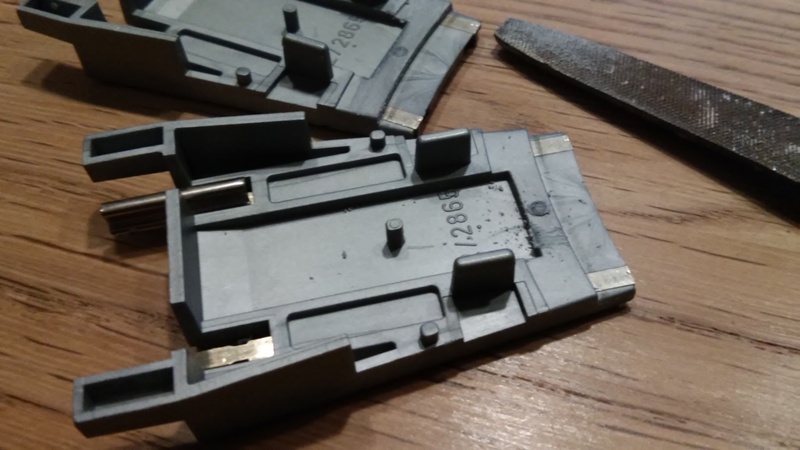
Daarna provisorisch de boel gemonteerd, en de brug loopt af en toe vast. Dat kan geen kwaad voor de stappenmotor zelf, maar nauwkeurig draaien en stoppen voor de sporen wordt zo wel een probleem. Na wat onderzoek zijn het de railcontacten die af en toe haken of stroef lopen. Die contacten zijn niet echt nodig, want de sporen worden apart van stroom voorzien en de brug heeft 2 glij contacten om stroom op te nemen. Dus de rail contacten zo verbogen dat ze nauwelijks nog tegen de randen veren.

Ook zitten er een soort van nokjes onder de rails. Hier klikt de brug enigszins in vast. Handig bij bij handbediening, maar ook niet meer nodig. Die vijlen we ook maar weg.
Tijd om de motor goed te bevestigen. Het gat in het midden groter geboord, zodat de as van de motor er doorheen kan. Ook 2 gaatjes geboord voor de bouten waar de motor mee wordt vast gezet. Twee M4 boutjes en moeren volstaan.
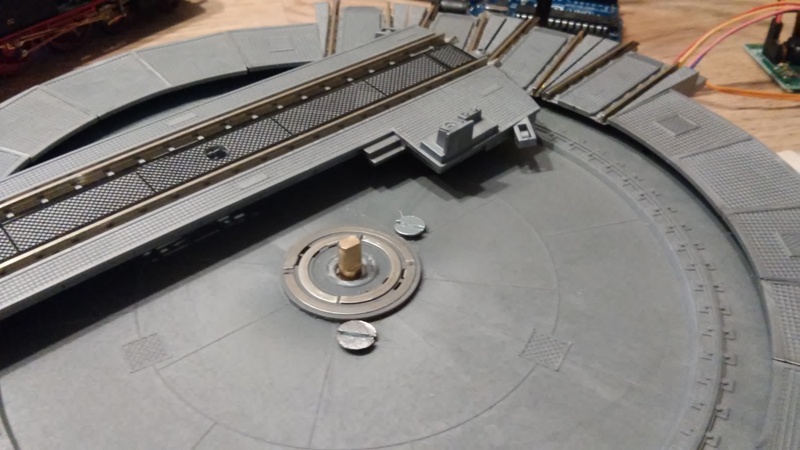

Een sensor is met name nodig bij het starten van draaischijf als de stroom weer aan gaat om te weten waar de beginstand is. De sensor is de verbinding een van de buitenste rails en een rail van brug geworden. Ik heb de contactjes weer iets teruggebogen.

Daarna bleek het erg moeilijk de brug zuiver te laten bewegen en op de goede plek te laten stoppen. Het bleek dat de draaischijf constructie niet erg stabiel is ( de bodem tordeert makkelijk). Maar er zitten 3 schroefgaten onder de afdekplaatjes, dus eerst maar eens een stabiele ondergrond gemaakt uit een stevige spaanplaat van een afgedankte IKEA koffietafel.
.
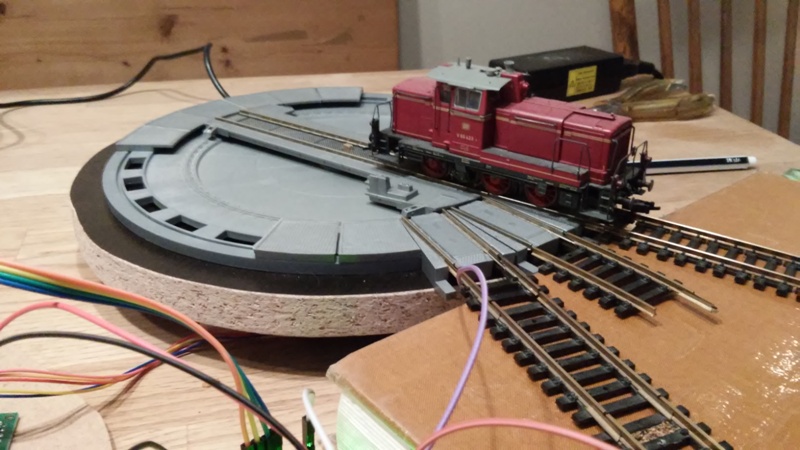
De ondergrond helpt, dus klaar voor een uitgebreidere test. De bewegingen voor:
- V60: soepel
- BR64: soepel
- BR78: soepel
- V160: stroef en onnauwkeurig
- V100: stroef en onnauwkeurig
Wat blijkt: locs met een goede gewichtsverdeling in het midden of over de hele lengte draaien heel sopel op de brug, maar locs met het gewicht op de uiteinden (draaistellen), geven veel druk op de plastic wieltjes en rails. De wrijving wordt te groot....
Uiteindelijk bleek dit op te lossen door de hoogte van de brug op de as nauwkeurig af te stellen. Een ringetje zorgt voor de juiste afstand.
Nu doen zowel de V60 als V160 het goed.

De test van het oprijden, draaien en afrijden met de BR64 is vastgelegd op film:
Dus klaar voor de definitieve aansturing met de Arduino Nano (veel goedkoper dan zijn grote broer).
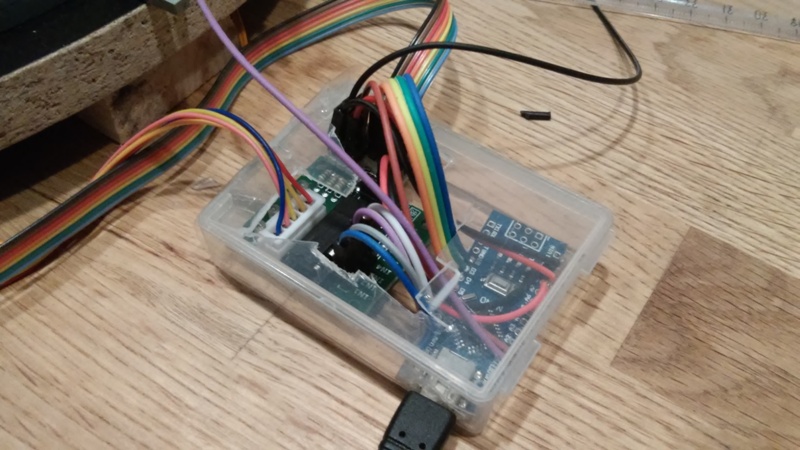
Om het een en ander in te kunnen bouwen in een compact schroeven-doosje van de bouwmarkt, zijn er andere pinnen gebruikt dan op de grote Nano, maar met wat andere definities in het stuurprogramma is dat snel op te lossen. Verder is de controller van de stappenmotor hier ingebouwd en is een 7-polige platte kabel voor het bedieningspaneel aangesloten: massa, plus, sensor en 4 draadjes voor de terugmeldings-LEDs.
De mini-USB aansluiting wordt straks ook gebruikt als voedingskabel. Het geheel trekt minder dan 500mA, dus kan makkelijk op een telefoonlader draaien.
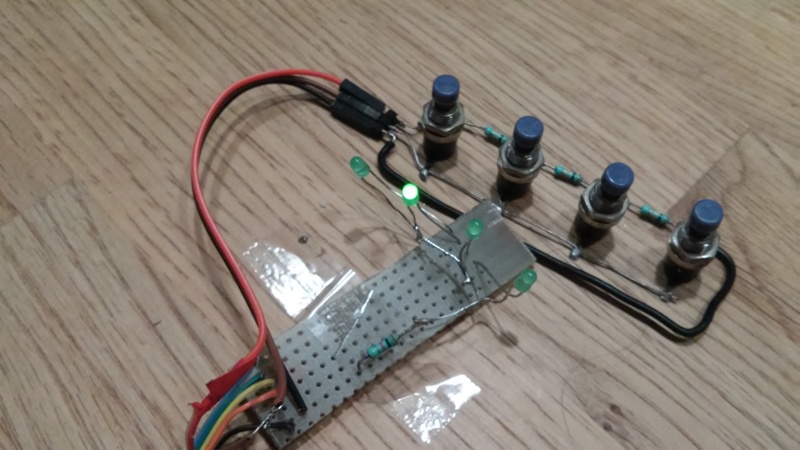
Het bedieningspaneel is nog even los opgezet, zodat de knoppen en de LEDs later in het paneel van het station kunnen worden ingebouwd. Spanningsverdeler met 4 knoppen , 1 voor elk spoor, en 4 LEDs, ook voor elk spoor. Als je een knop indrukt, gaat de LED erbij knipperen zolang de draaischijf naar het spoor aan het draaien is. Eenmaal op de plek aangekomen brandt de led continue.
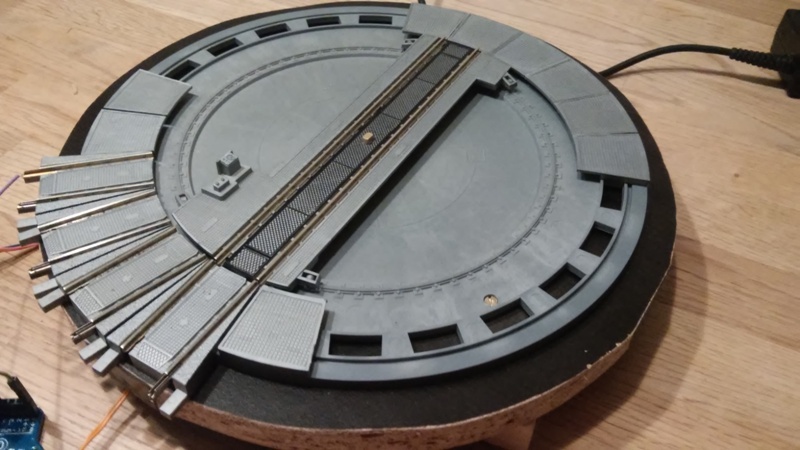
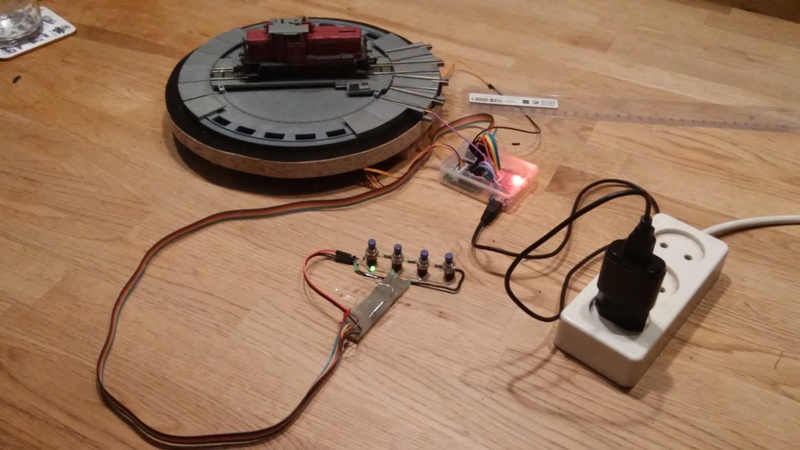
Nog even een overzicht van de gehele constructie.
En
@mark mms , zal ik de Arduino sketch ook nog ergens neerzetten?
Rob


